line-follower-robot
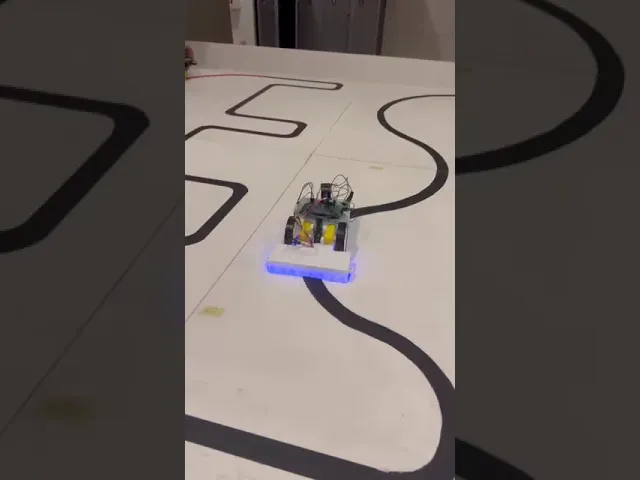
built a custom line-following robot with a 3D-printed frame and PCB that autonomously follows a looping black-line course.
Sensors & Sensing
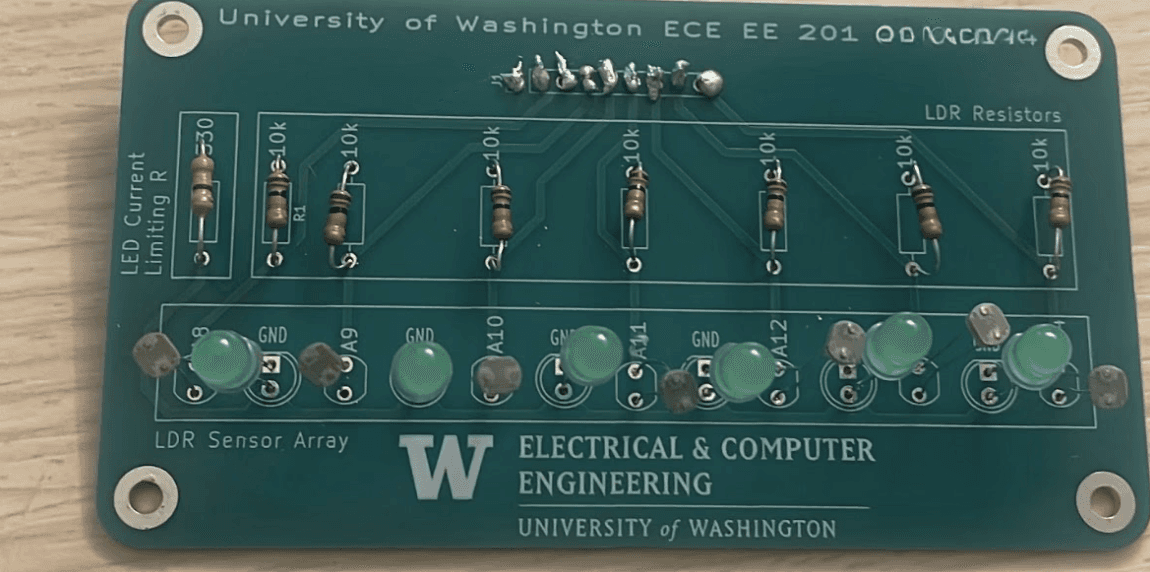
Used photoresistors and voltage dividers to detect black vs. white surfaces
Integrated LEDs and a light shield for better contrast and noise reduction
Control System
Powered by an Arduino Mega with motor shield
Designed and tuned a PID loop to track deviations in sensor input and adjust motion
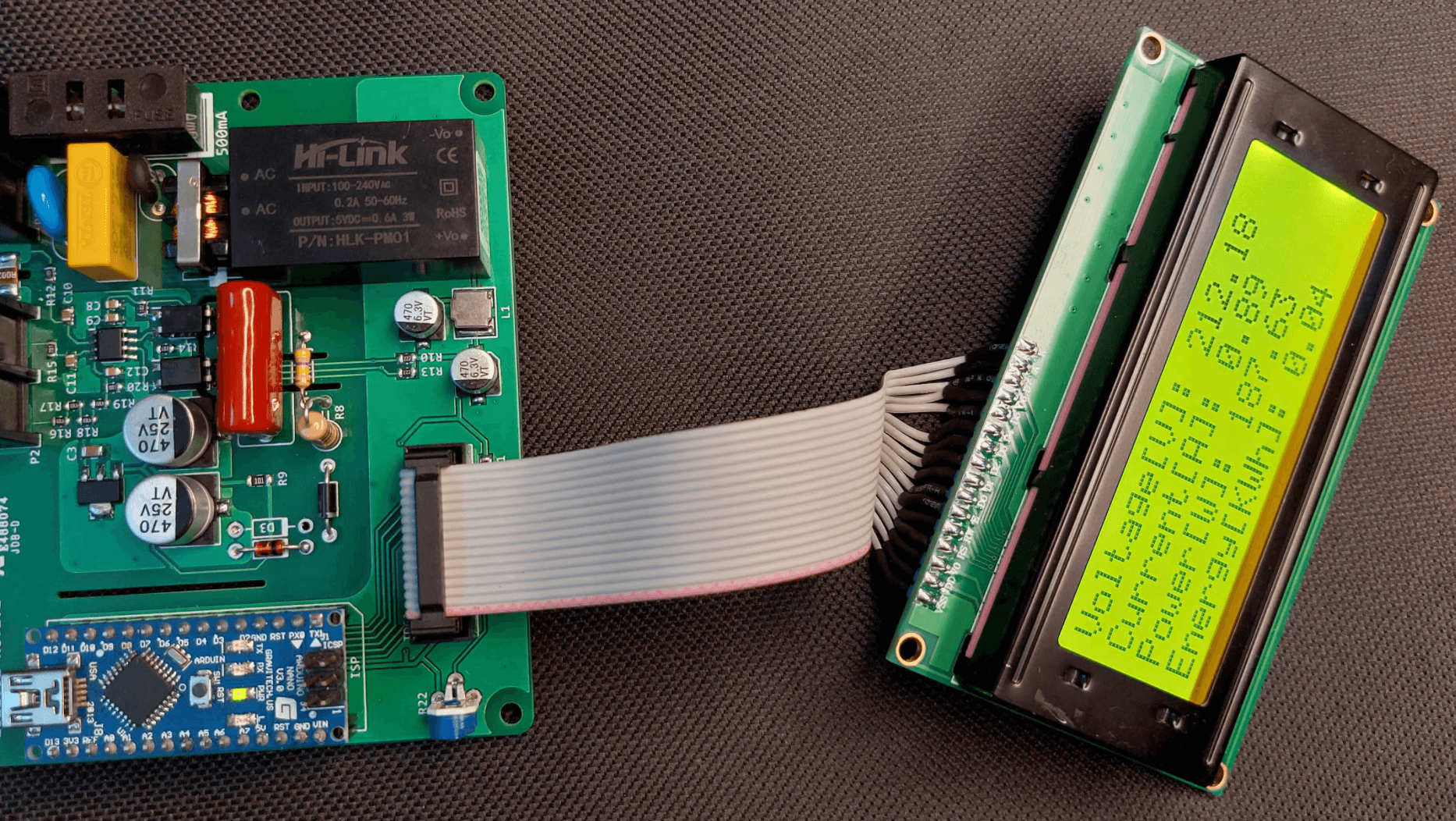
Implemented serial diagnostics for calibration and debugging
Mechanical Design
Designed and 3D-printed a custom chassis with dedicated components:
Photoresistor mounts
Centered battery pack
Arduino mounting tray
Built-in cable channels for tidy wiring
Mounted DC motors with precision alignment for balanced motion
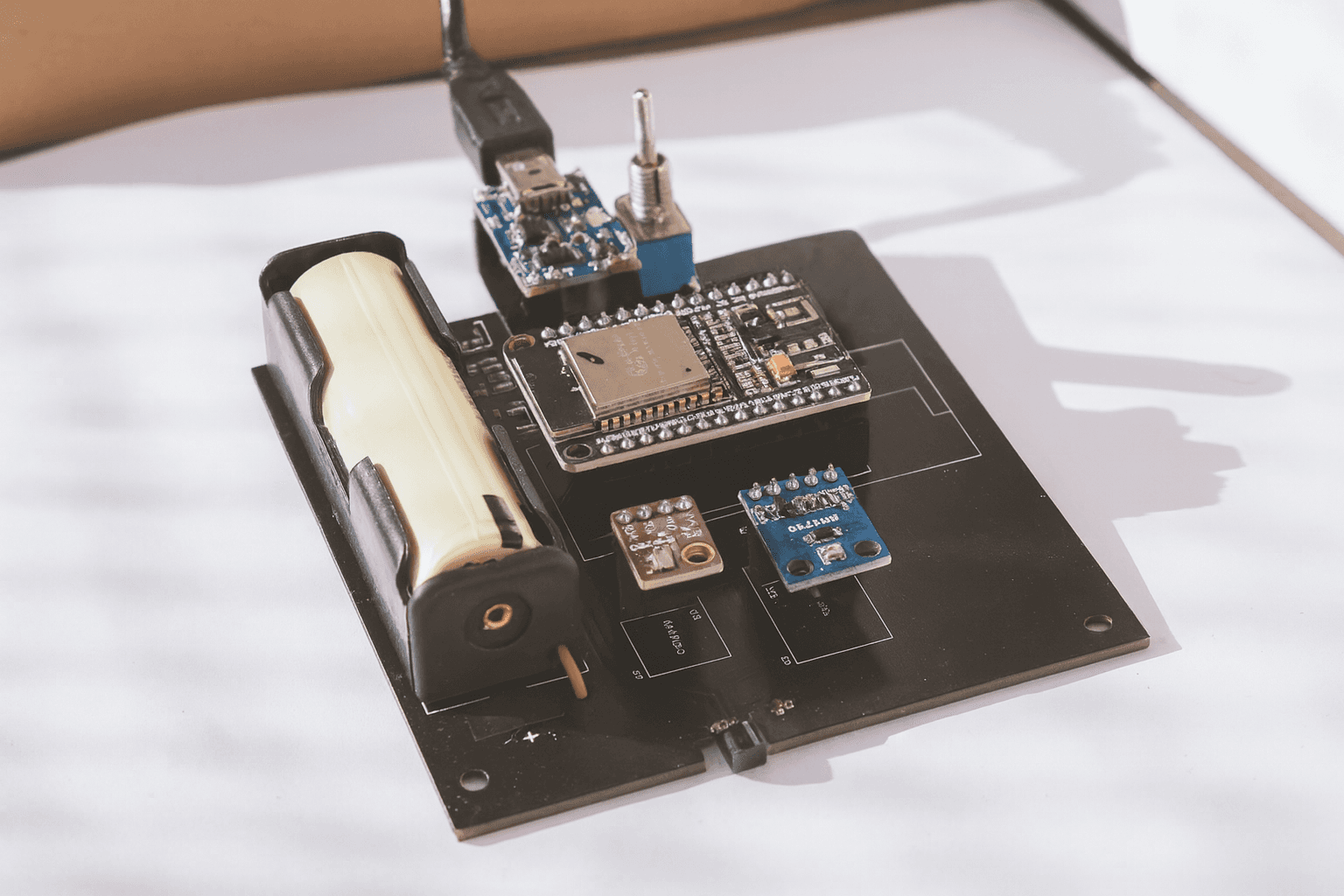
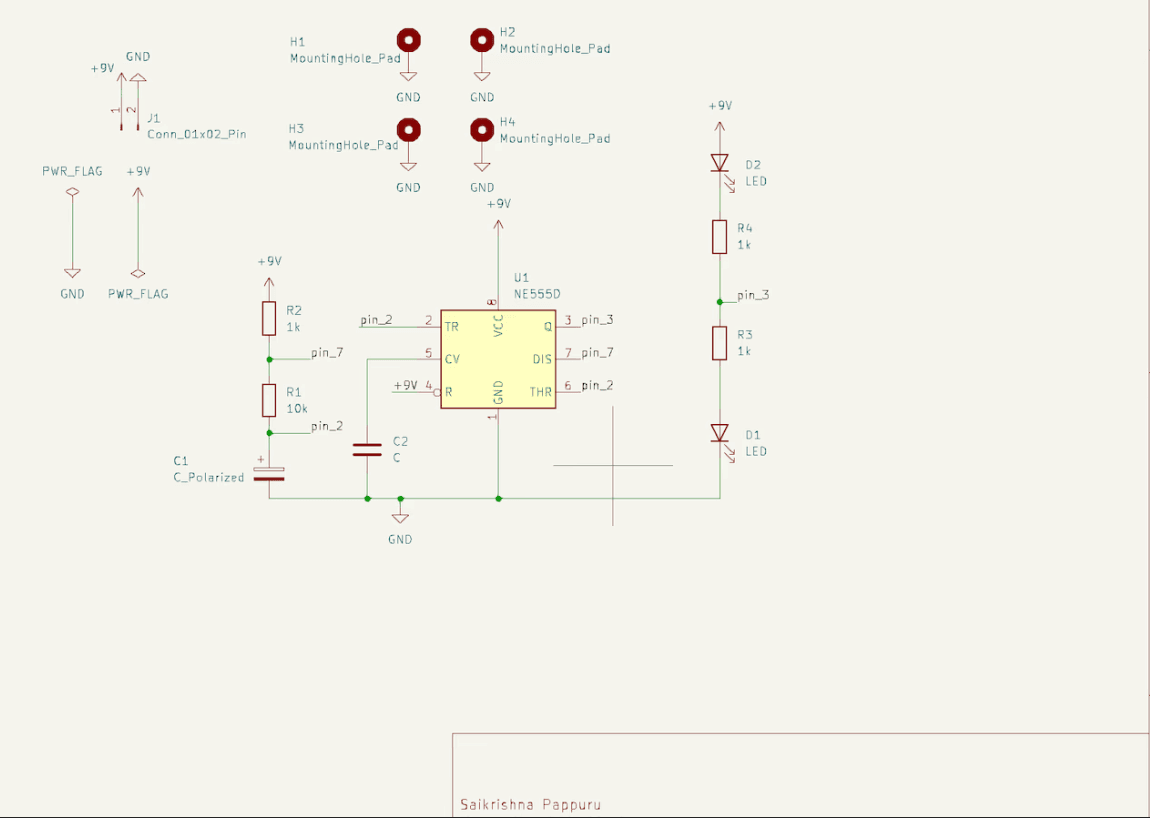
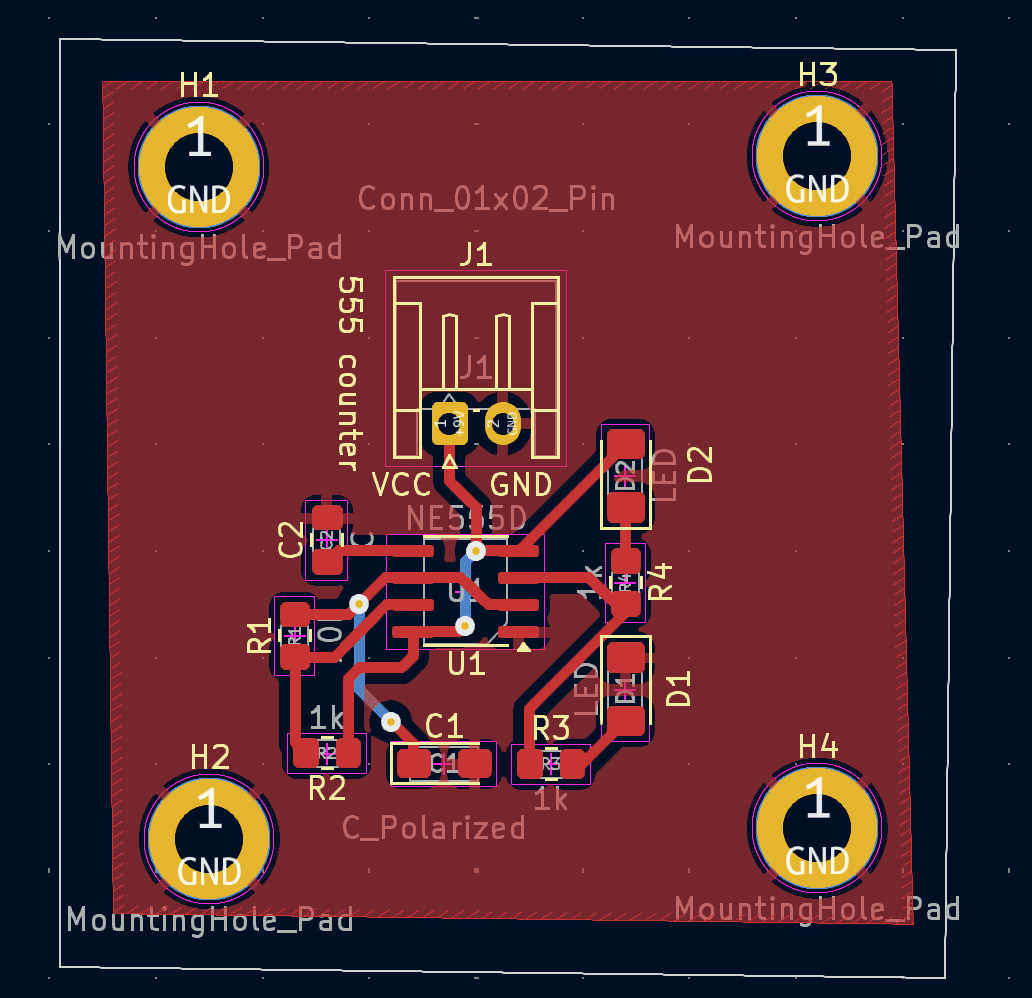
PCB:
Schematics:
see also